竹村 憲太郎
タケムラ ケンタロウ
- 教授
- 学位:博士(工学)
基本情報
所属
- 情報理工学部 / コンピュータ応用工学科
- 総合理工学研究科 / 総合理工学専攻
- 工学研究科 / 電気電子工学専攻
- 情報技術センター
研究と関連するSDGs

研究内容
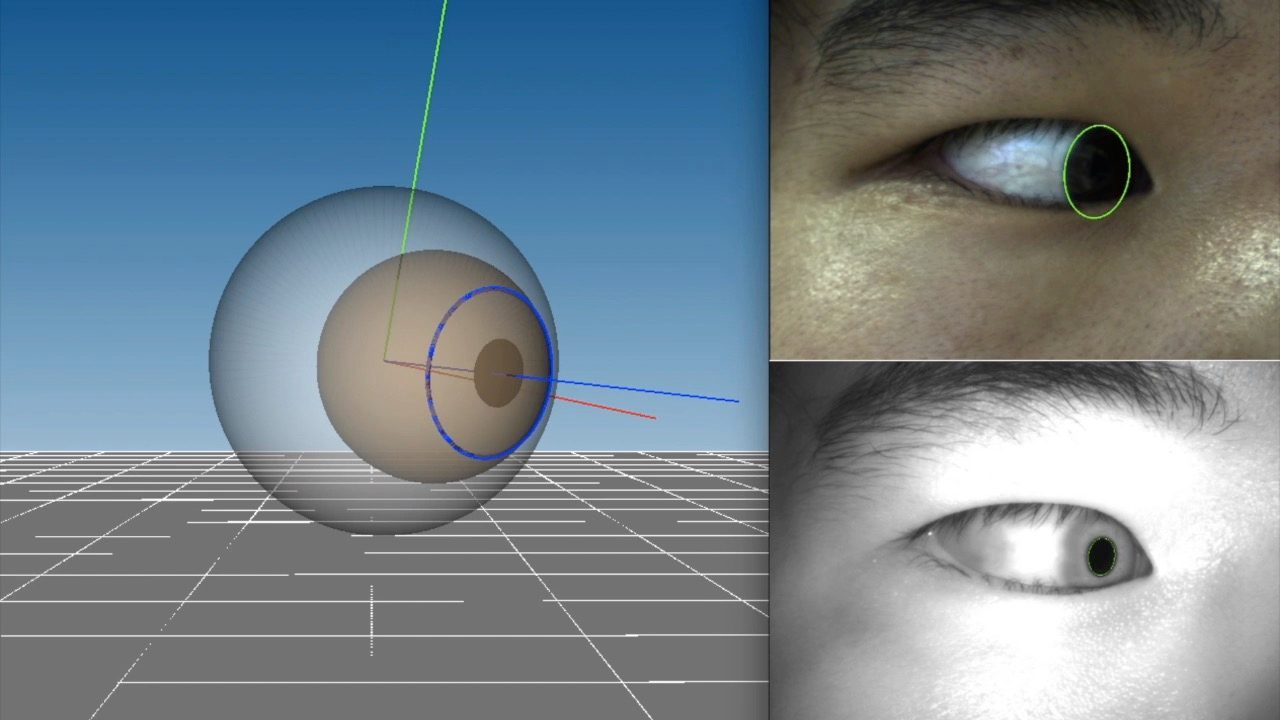
ヒューマンセンシング技術でインタフェースの未来を拓く
当研究室では,次世代のユーザインタフェースの実現を目指し,視線計測技術や人体を伝播する振動のセンシングなど,人の計測技術を中心に研究を行っている.視線計測技術の研究では,オフィスや車の運転中など,様々な状況下で常時計測可能な技術の確立を目指している.また,振動センシングでは,人の姿勢によって人体を伝播する振動に変化が生じることを利用し,関節角度,指先接触力,手形状などの推定に取り組んでいる.
詳細情報
研究キーワード
- 視線計測技術
研究分野
- 情報通信 知覚情報処理
- 情報通信 ヒューマンインタフェース、インタラクション
- 情報通信 知能ロボティクス
受賞
- 総務省 戦略的情報通信研究開発推進事業事務局 研究開発奨励賞
- The ACM International Conference on MobileHCI 2019 Best Poster Honorable Mention
- 日本ロボット学会 研究奨励賞
書籍等出版物
- OpenCV プログラミングブック
講演・口頭発表等
- 角膜表面反射画像と環境画像を併用したキャリブレーションフリー視線計測手法
所属学会
- IEEE
- Association for Computing Machinery
共同研究・競争的資金等の研究課題
スクリーン上へ提示した不知覚なマーカによる能動的なイベントベース視線計測技術
偏光を用いた視線計測技術の確立と多様なディスプレイ環境への応用
角膜上の環境反射像を用いた位置推定
角膜表面上のディスプレイ反射像を用いた可視光視線計測技術
体導音を用いた身体情報センシング
触覚情報の記録・提示が可能なアクティブ骨導音センシング
アクティブ骨導音センシングを用いた次世代インタフェース技術の研究開発
触覚情報の記録・提示が可能なアクティブ骨導音センシング
角膜表面反射画像を用いた注視点・注視対象推定の研究開発
アクティブ骨導音センシングを用いた常時装着型手入力インタフェース
ヒューマンロボットインタラクションのための動作データベースに基づく柔軟な動作生成
自由頭部運動状況下における三次元環境地図に基づく注視点推定
拡張現実感における注視駆動型情報提示技術の開発
産業財産権
- 経路探索装置及び移動システム
- 経路計画生成装置および該方法ならびにロボット制御装置およびロボットシステム
- インタフェースシステム
ResearchMapへ移動します
お問い合わせ先
取材に関するお問い合わせ
学長室(広報担当)
Tel. 0463-63-4670(直通)