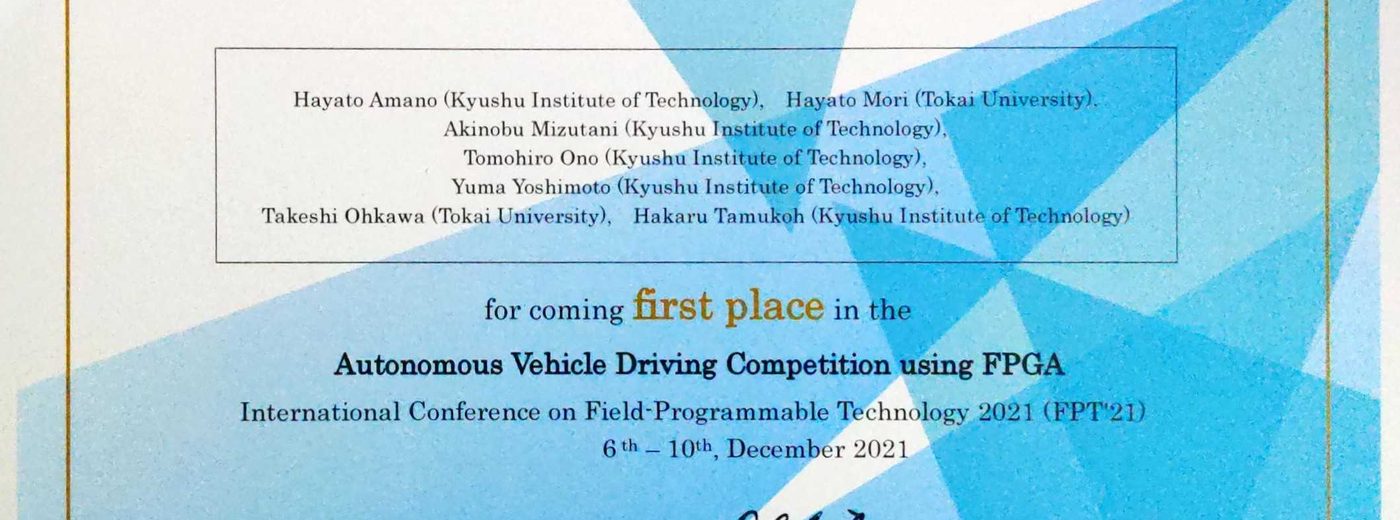
2021年12月10日、ニュージーランド オークランドを拠点にオンライン開催された再構成可能デバイスに関する国際学会International Conference on Field-Programmable Technology 2021 (FPT’21) のFPGA Design Competitionに、本学情報通信学部 組込みソフトウェア工学科 大川研究室と九州工業大学大学院 生命体工学研究科 田向研究室の学生が中心となって結成しているチーム「Ultra_Bot」(指導教員:本学情報通信学部組込みソフトウェア工学科 大川 猛 准教授、九州工業大学大学院生命体工学研究科 田向 権 教授)が出場しました。今年度結成された本チームは、10月に開催された「第10回 相磯秀夫杯 FPGAデザインコンテスト」に続いて本競技会でも優勝し、2連覇という快挙を成し遂げました。
本競技会は、高速でかつ低消費電力で動作する、内部の論理回路を書き換え可能なデバイス、Field Programmable Gate Array (FPGA)を用いて完全自動運転に必要な画像処理技術と車体制御技術の研究開発を加速させることを目的として開催されています。10月に本チームが優勝した「第10回 相磯秀夫杯 FPGAデザインコンテスト」に続く競技会で、アジアおよび環太平洋地域における再構成可能チップを扱った主要な国際学会PT’21(Field Programmable Technology)の一部として実施されました。また、新型コロナウイルス感染拡大の影響により開催拠点をオークランドから岡山大学津島キャンパスに変更し、現地+遠隔によるハイブリッド形式での開催となりました。
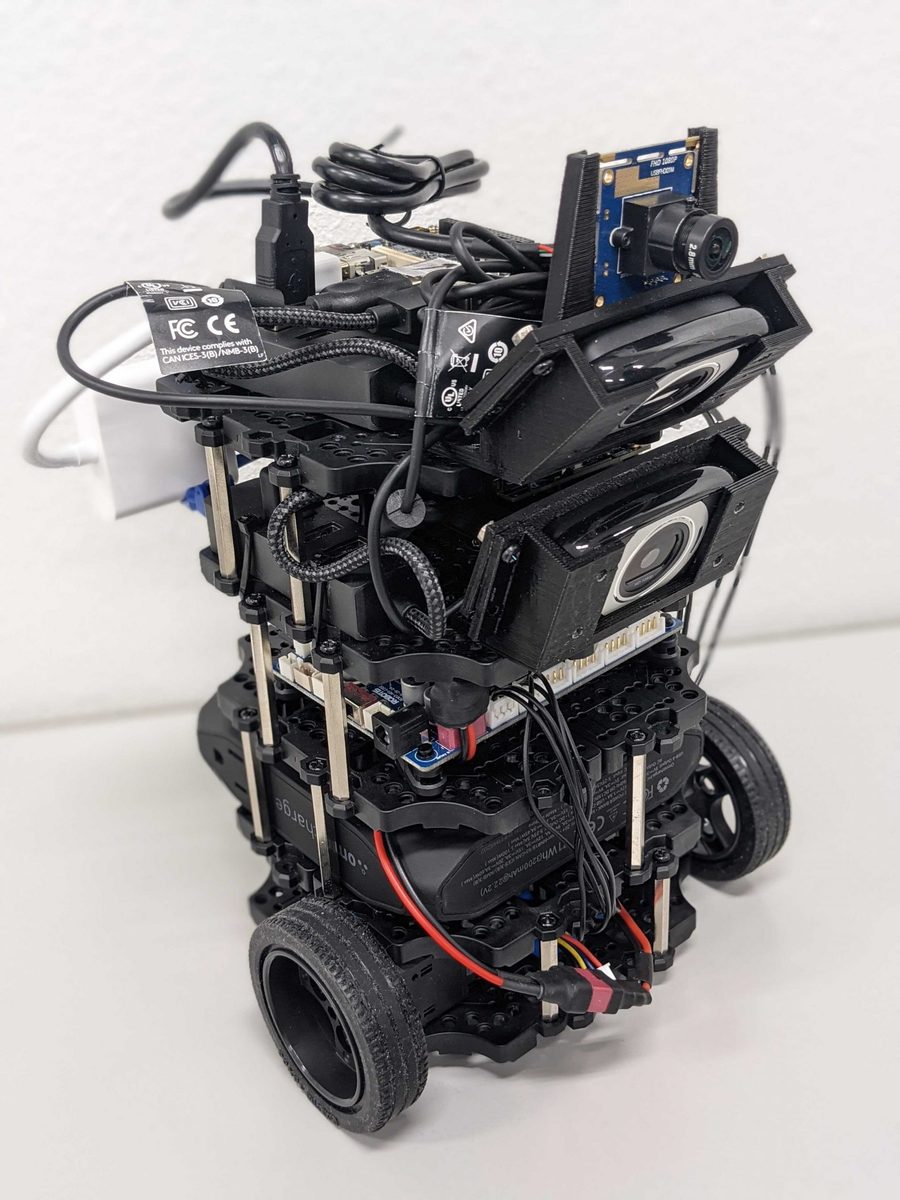
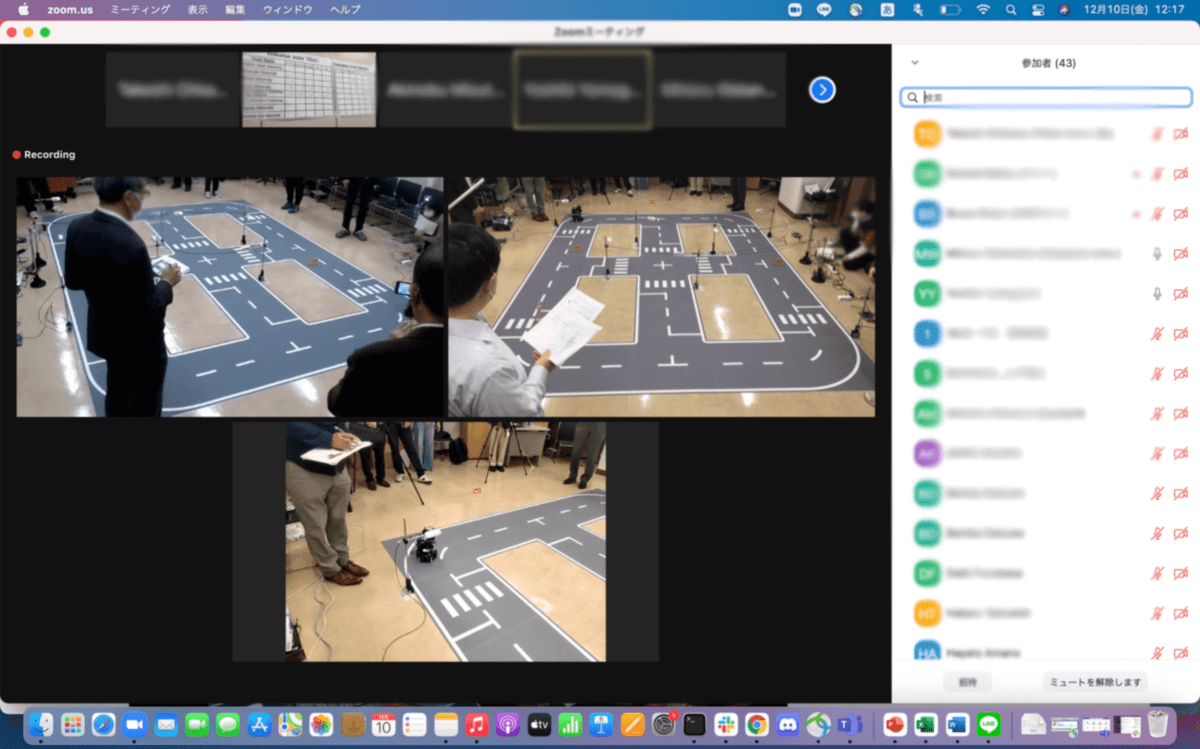
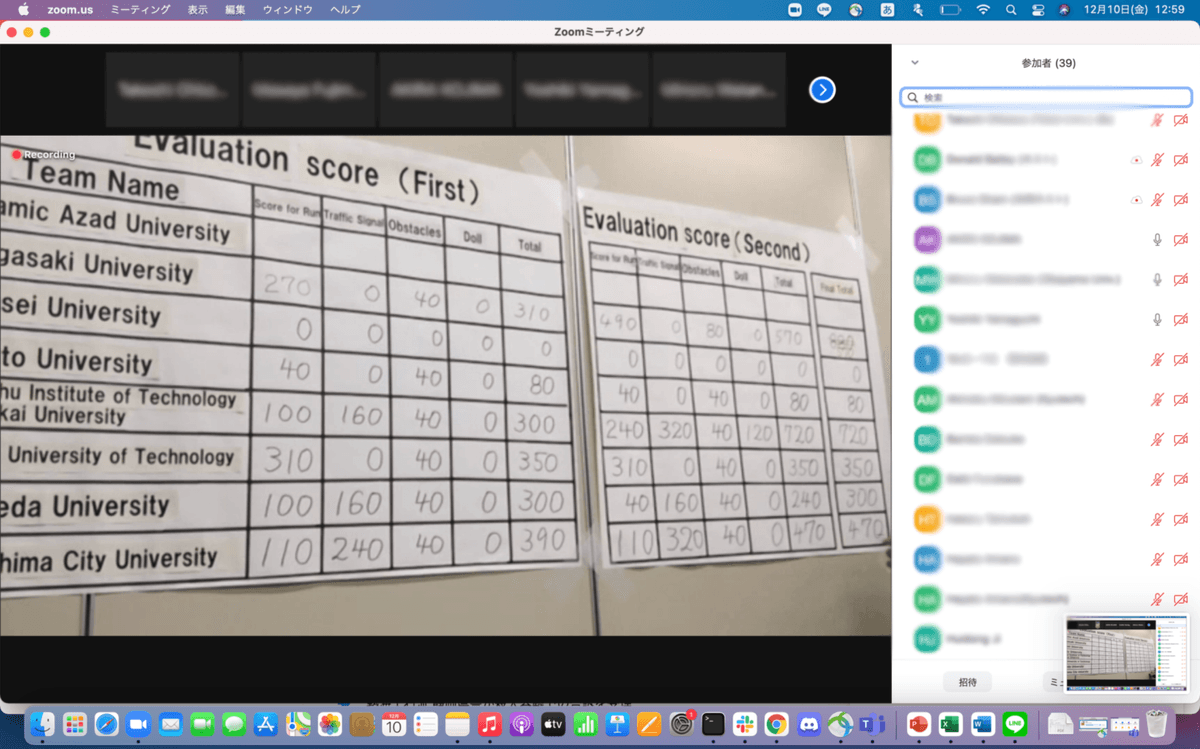
競技では、画像情報をFPGAで処理する小型自律走行ロボットが、予め指定された経路を走行しながら、赤信号で停止する、道路上に設置された障害物を回避する、歩行者を模した人形を発見したら停止する、といった課題をこなします。チーム「Ultra_Bot」は道路上の白線を検出する機能、道路標示や道路上に設置された障害物を認識する機能などをFPGAに実装し、出場チームの中で唯一全ての課題で点数を獲得して1位という優秀な成績を収めました。また、課題の中でも達成困難とされている歩行者を模擬した人形の検出にも唯一成功しました。
このロボットに搭載されている車体制御ソフトウェア及び白線認識機能は本学情報通信学部組込みソフトウェア工学科の大川研究室によって開発されました。また、白線認識機能及び障害物認識機能はFPGAに実装され、車体制御ソフトウェアとの通信にはロボット用ミドルウェアであるRobot Operating System (ROS) 2が用いられています。FPGAによって処理された情報をROS2ノードとして扱う仕組みを構築するツールとして、大川研究室によって開発されたFPGA-Oriented Easy Synthesizer Tool (FOrEST) を用いており、大川研究室の活躍はチームの優勝に大きく貢献しました。
なお、本競技会は新型コロナウイルス感染対策を十分に講じたうえ、現地参加メンバーと遠隔参加メンバーが混在するハイブリッド形式での開催となりました。遠隔参加者との公平を期すため、現地参加者は現地の学生スタッフによるサポートの下、コースが設置された部屋とは離れた部屋から英語でのコミュニケーションによるテスト走行やロボットの調整などが求められました。
◇「 (FPT’21) FPGA Design Competition」についてはこちら
https://parallel.auckland.ac.nz/fpt21/competition.html
◇「九州工業大学大学院 生命体工学研究科 田向研究室」についてはこちら
https://www.brain.kyutech.ac.jp/~tamukoh/
◇「東海大学 情報通信学部 大川研究室」についてはこちらhttps://sites.google.com/view/ohkawalab/%E3%83%9B%E3%83%BC%E3%83%A0