渡邉 啓介
ワタナベ ケイスケ
- 教授
- 学位:博士(工学)
基本情報
所属
- 海洋学部 / 海洋理工学科 海洋理工学専攻
- 海洋学部 / 航海工学科 海洋機械工学専攻
- 総合理工学研究科 / 総合理工学専攻
- 海洋学研究科 / 海洋学専攻
ジャンル
- 海洋開発
- 海洋調査
研究と関連するSDGs


研究内容
人間の海洋活動を支える機器の自動化・ロボット化
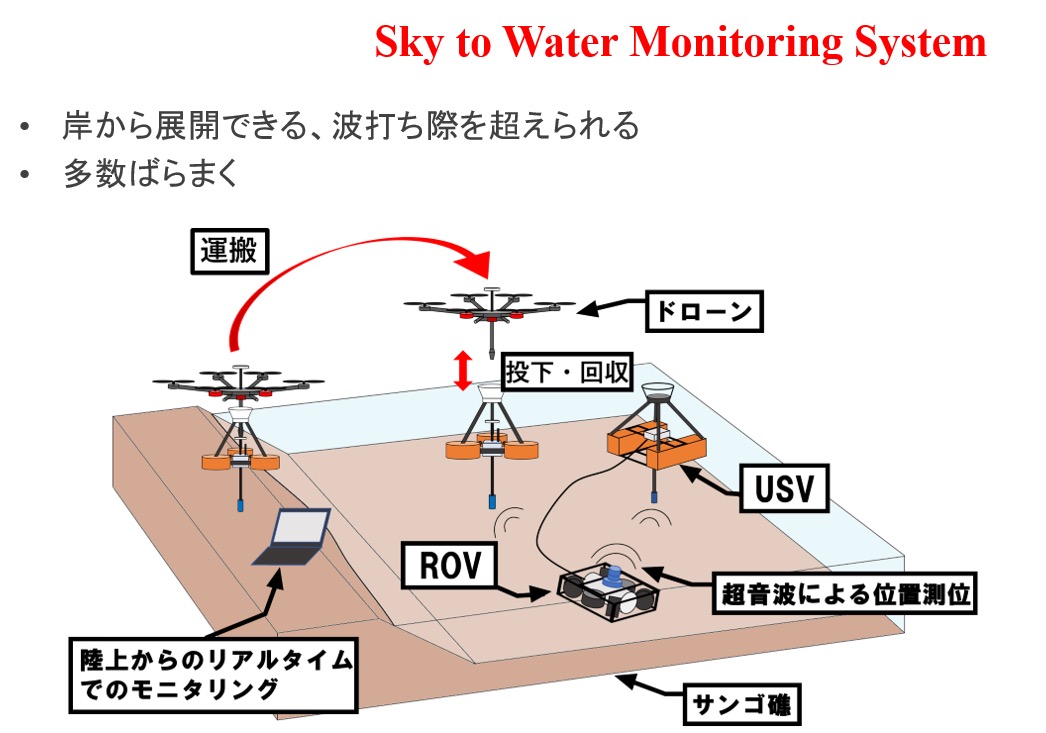
主にサンゴ礁など沿岸域の海洋環境調査を対象として、小型ロボット船の自動航行アルゴリズム、ドローンで水中ロボットを運搬し、洋上と水中の同時多点観測を可能にするシステムの構築を行っている。その他、海底鉱物資源探査のための海底歩行プラットフォームの開発や、船舶の排ガス規制に対応する次世代型漁船の概念設計、水中ロボットによる駿河湾海底の生物調査など、自動化・ロボット化をテーマに実験的研究を進めている。
詳細情報
研究キーワード
- 海底資源開発、水中ロボット、海洋環境モニタリング、洋上風力発電、サブシ―テクノロジー
研究分野
- フロンティア(航空・船舶) 船舶海洋工学 海底資源開発、水中ロボット、海洋構造物、メンテナンス、海洋環境モニタリング
委員歴
- 日本船舶海洋工学会東部支部運営委員会委員
- 日本船舶海洋工学会 海洋工学委員会委員
- 日本船舶海洋工学会東部支部会務委員
受賞
- 計測自動制御学会 SI2005 ベストプレゼンテーション賞
- 日本造船学会、日本海事協会、日本財団 日本造船学会賞、日本海事協会賞、日本財団会長賞 海中柔軟構造物のアクティブ制御による設置・組立に関する 基礎的検討、未知潮流外乱中における弾性応答―剛体運動連成系の学習軌道制御
論文
カタマラン型USV開発のための実海域実験システムの構築
無人調査船群制御のための水槽実験システムの構築
書籍等出版物
- 材料力学 : 構造強度設計の基礎
担当経験のある科目
- 振動工学
- 制御工学
- 材料力学
- 海洋学研究ゼミナール2
- 海洋機械工学研究
- 海洋機械工学ゼミナール2
- 海洋機械工学ゼミナール1
- 海洋実習3
- 海洋実習2
- 海洋実習1
- 機械力学
- メカトロニクス実験
- 海底資源開発工学特論
- 海洋エネルギー工学特論
- ロボット工学
- 船体構造工学
- 材料力学演習
- 海洋学研究ゼミナール1
所属学会
- 日本船舶海洋工学会
共同研究・競争的資金等の研究課題
SDGsを体現するブルーインフラとしてのバイオマス灰ジオポリマーのポテンシャル
海底鉱物サンプルを取得・分析する歩行式掘削プラットフォームの基礎的研究
大水深海中構造物の自動制御による設置手法の開発を目指した実海域実験
日中交流史における海事・造船技術に関する工学的検討
水中マルチエージェントの位置情報共有と水中トラス組立ミッションの水槽実験
沿岸域調査用自律型海中ロボット群の通信システムと協調制御に関する研究
自然エネルギーを用いたメタンハイドレート生産システムに関する研究
小型軽量安価な自律型沿岸海洋調査システムの開発
大型半潜水式浮体ユニットの急速結合法に関する研究
半潜水式超大型浮体の設計法の確立に関する研究
産業財産権
- 海底鉱物採掘装置および海底鉱物の採掘システム
ResearchMapへ移動します
お問い合わせ先
取材に関するお問い合わせ
学長室(広報担当)
Tel. 0463-63-4670(直通)