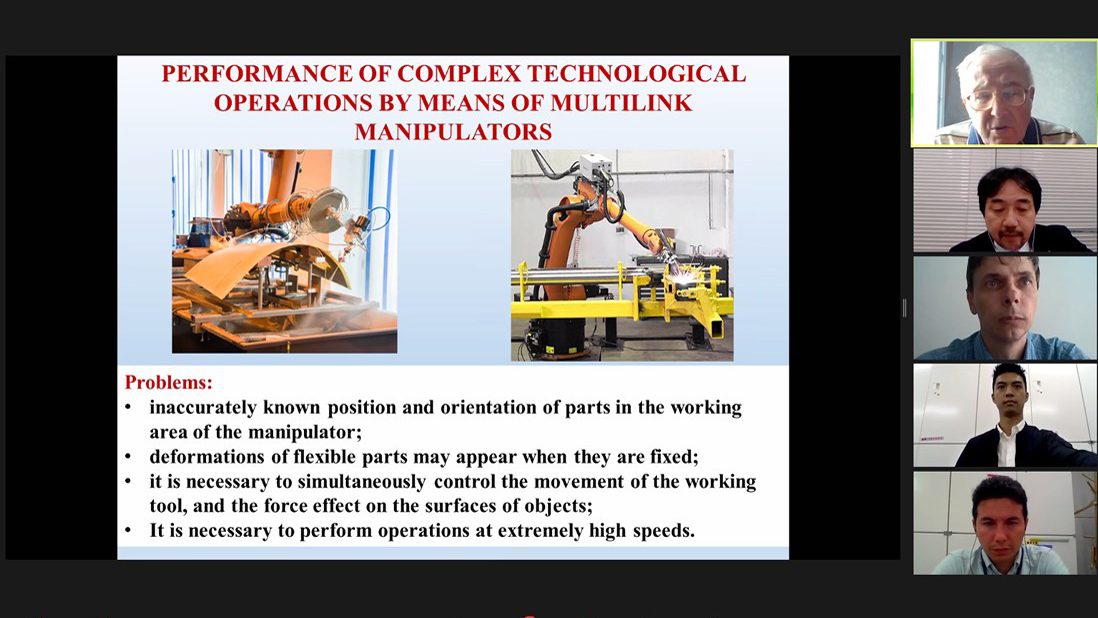
東海大学では7月23日に、ロシア・極東連邦大学と合同で「The 1st FEFU-Tokai Joint Workshop on Robotics, Mechatronics and Control」を開催しました。本学では、文部科学省の平成29年度「大学の世界展開力強化事業」の採択を受け、極東連邦大をはじめとするロシアの大学と連携してライフケア分野を担う人材育成を目指す「ライフケア分野における日露ブリッジ人材育成:主に極東地域の経済発展を目的として」を展開しています。今回のワークショップは、同事業を通じて深まった両大学の連携を、ロボットの研究開発にも広げることを目的に初めてオンライン上で開いたもので、両大学の研究者や学生ら約20名が参加しました。
最初に、極東連邦大工学部自動制御学科学科長のVladimir Filaretov教授が水中探査ロボットの研究を紹介。未知の海底でも最適なルートを選択しながら海中生物の採取などを行えるアルゴリズムやシミュレーション技術、プロトタイプの部品をもとに、適応制御を用いて高精度な設計・製造を行える技術の研究などについて解説しました。その後、工学部精密工学科の山本佳男教授(国際教育センター所長)が、自動探査ロボットやヒューマノイド・ロボットなど本学で展開されているロボティクス分野の最新研究の全体像を、大学院総合理工学研究科のアザマット・イシュムハメドフさんとプア・マシュー・ティモシーさんが、ワイヤー制御で自在に動くことができるタコ足型ロボットと障害物を避けながら自動走行し、地図を作っていく自律型移動ロボットの研究をそれぞれ紹介。自動制御を可能にするアルゴリズムなど技術面や今後の連携の進め方などについて熱心に意見を交わしました。
山本教授と極東連邦大のAleksander Zuev准教授は、「今回のワークショップを通じて、研究内容に共通点も多いことが確認できた。今後もワークショップを継続し、将来の共同研究につなげたい」と語りました。