
時代や環境に適応進化する
組込みロボットの研究
研究概要
災害現場や、社会インフラの点検作業など、様々な社会環境でロボット導入が期待されています。このようなロボットの本質的な特徴は、周囲の情報を集めながら状況を判断し、自律的に行動できることです。そのように行動するロボットは、周囲の情報を得るために、カメラ、マイク、各種センサー(距離、加速度、磁気を検出するデバイス)から膨大な情報を入手して、必要な情報を抽出するための計算処理、画像処理などを行います。そして、計算した情報をロボットの自律的行動のためにも活用します。したがって、ロボットにもより高性能な処理が求められています。また、近年のIoT 技術の発展に伴い、 1 台のロボットでは解決が難しいことでも、複数台のロボット同士が通信しながら協調して問題に取り組むことが可能な時代となりました。本研究では、従来のロボットの組込み処理(リアルタイム制御)、IoT 技術、クラウド技術を駆使しながら、個性豊かなロボット同士が最適な行動をする世界を目指しています。
「多種多様なロボットによる協調動作」
1 台のロボットでは機能不足や、一定時間で入手できる情報量が不足してしまい、成し遂げられないこと、時間がかかってしまうサービスなどがあると考えます。本研究では、複数のロボットで役割を分担しながら目的を達成する協調型群ロボットを目指します。人間の「個性」と同様にロボットにも機能や性能に違いを持たせ、多種多様なロボットを用いて、ロボット間で情報を共有しながら連携作業する方式に取り組みます。
「進化計算を用いたロボット制御」
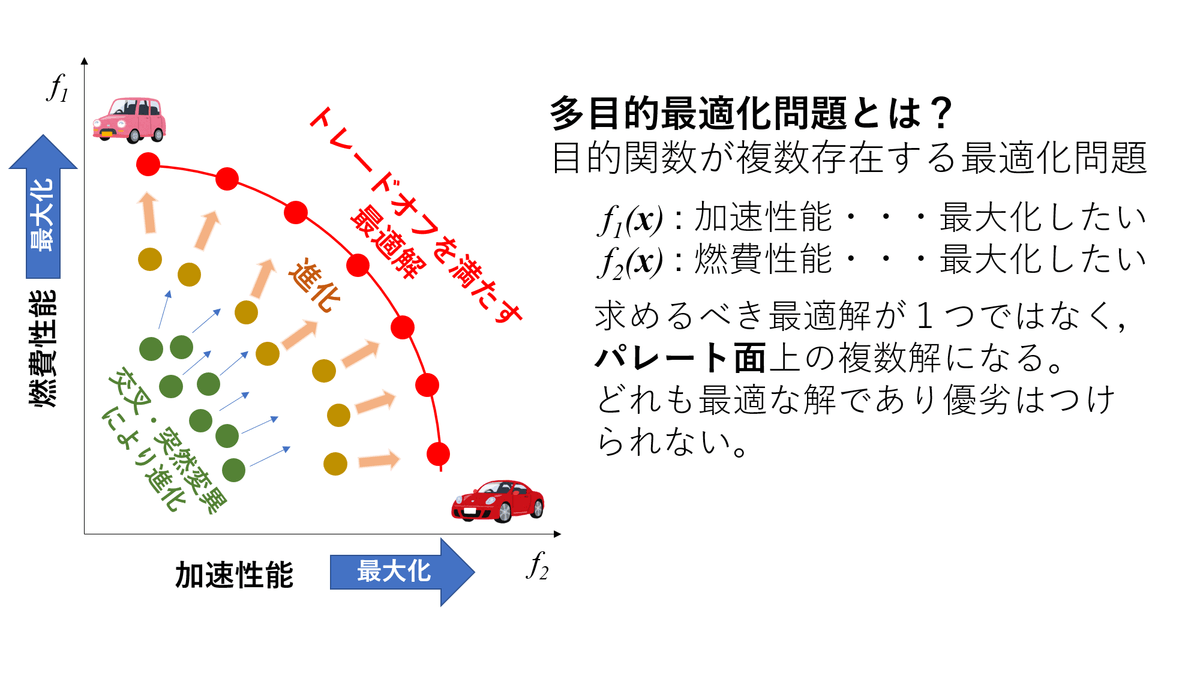
ロボットを環境の変化に対応して適切に行動させるには、置かれた環境やロボット自身の個体差に着目したロボット制御を行うことが理想です。本研究では、進化計算(Evolutionary Computation)を応用したロボット制御に取り組んでいます。進化計算は、元々は生物の進化にインスパイアされて誕生した研究領域であり、複数の目的が存在する最適化問題(多目的最適化問題)などにも応用されます。
「高度IT 人材を育成する産学協働の実践教育」
身近な製品に組込みシステムが内蔵されている時代です。組込みシステム単体では成し遂げられない事でも、組込みシステムを組み合わせて最適な設計を施すことで、より多くの要求にこたえられるようになります。enPiT(Educational Network for Practical Information Technology) と呼ぶ教育プログラムを通じて、大学で学ぶ様々な技術を組み合わせて多様な組込みシステムを設計できる技術者の育成に取り組んでいます。